I. Pregled sustava
1. Pozadina projekta
Posljednjih godina, ilegalni prijevoz teretnih vozila na autocestama postao je ozbiljan problem koji ugrožava sigurnost nacionalnog cestovnog prometa. Preopterećuje autoceste i mostove, što uvelike smanjuje vijek trajanja cesta i mostova; istovremeno se uvelike smanjuje faktor sigurnosti vozila, što stalno uzrokuje prometne nesreće; također je lako uzrokovati prometne gužve i onečišćenje okoliša.
Vlade na svim razinama diljem zemlje kontinuirano su povećavale svoje napore u kontroli preopterećenog prijevoza cestovnih vozila i postigle su važne postupne rezultate. Međutim, zbog složenih društvenih i ekonomskih čimbenika, nacionalna situacija s otkrivanjem preopterećenja i dalje je vrlo ozbiljna, a skrivene opasnosti od ponovnog pokretanja nisu uklonjene; konsolidacija rezultata upravljanja i kontinuirano promicanje rada na otkrivanju preopterećenja i dalje je pod velikim pritiskom. Stoga je upravljanje preopterećenim prijevozom vozila dugoročan i svakodnevni posao u kojem se mora ustrajati. Ključno je uključiti upravljanje preopterećenim radom u dugoročni mehanizam. Također igra pravnu odvraćajuću ulogu u vezi s preopterećenim vozilima, a može proširiti svoje funkcije i na inspekciju cesta, suzbiti slučajni mentalitet ilegalnog prijevoza te pravovremeno kontrolirati i uklanjati razne ilegalne prijevoze, uključujući preopterećeni prijevoz.
2. Uvod u sustav vaganja
Princip vaganja statičke vage za kamione je parkiranje svih vozila na platformu za vaganje kako bi se izvagalo cijelo vozilo. Ima visoku točnost vaganja i jasne nacionalne standarde. Međutim, konvencionalna vaga za kamione može izmjeriti samo težinu cijelog vozila, ali ne i osovinsku težinu. Može procijeniti je li cijelo vozilo preopterećeno, ali ne može procijeniti je li osovinska težina preopterećena. Ne može ispuniti zahtjeve odjela za cestovnu upravu za postizanje svrhe upravljanja preopterećenim prijevozom.
Ovaj plan kombinira dugogodišnje iskustvo naše tvrtke u projektiranju i proizvodnji opreme za detekciju preopterećenja i njezinu stvarnu primjenu u raznim regijama zemlje, pažljivo proučava upotrebu različite opreme za detekciju preopterećenja na tržištu i sveobuhvatno razmatra specifične potrebe odjela za upravljanje autocestama za upravljanje preopterećenim prijevozom. Usvaja naprednu tehnologiju i jedinstvene dizajnerske ideje za razvoj dinamičnog visokopreciznog sustava za detekciju težine vozila i tipa osovine. Može mjeriti i težinu osovine i ukupnu težinu te razlikovati tip osovine. Točnost težine osovine također se može uvelike poboljšati.
2. Sastav sustava preopterećenja i prekoračenja
1. Značajke sustava
Može vagati vozila koja prolaze malom brzinom i automatski utvrditi je li težina vozila ili osovinska težina preopterećena;
Može detektirati broj osovina, grupu osovina, težinu osovine i težinu vozila;
Može formirati potpune informacije o težini vozila, uključujući tip osovine, težinu osovine, grupu osovina i ukupnu težinu;
Može prenositi podatke o vaganju na računalo putem podatkovnog sučelja;
Središnji dio sustava koristi zrelu i pouzdanu opremu, modularnog dizajna, jednostavnu za održavanje i proširivanje, što osigurava visoku pouzdanost sustava.
Sistemski softver je zreo, vrlo pouzdan, podaci su potpuni i učinkoviti te se mogu u potpunosti dijeliti, što učinkovito poboljšava radnu učinkovitost i u najvećoj mjeri uklanja razne upravljačke rupe.
2. Proces sustava
Kamion se uvodi u traku za vaganje pretovarne stanice, a sustav za prepoznavanje registarskih pločica identificira broj registarske pločice;
Identifikator gume (osovine) razlikuje broj osovina, a sustav za vaganje vozila počinje vagati, određivati grupu osovina i izračunavati težinu osovine.
Kada sva vozila prođu kroz separator vozila i uđu na platformu za vaganje, a vaga je u relativno uravnoteženom stanju, bilježi se ukupna težina vozila i dobiva se osovinsko opterećenje.
Sustav za vaganje šalje podatke o vaganju (registarsku pločicu, broj osovina, težinu osovine, ukupnu težinu vozila itd.) računalu za detekciju. Računalo utvrđuje je li prekoračenje dopuštene težine i na zaslonu prikazuje podatke o detekciji kao što su težina vozila, prekoračenje i stopa prekoračenja.
Nakon što vozilo završi odgovarajuće operacije, osoblje za praćenje vozila pušta vozila koja nisu prekoračena ograničenja da napuste područje detekcije prema informacijama na zaslonu, navodi vozila s prekoračenjem da uđu u područje stanice radi obrade, ispisuje obrazac za pregled vozila s prekoračenjem i obavlja odgovarajuće operacije punjenja;
3. Sastav sustava i plan rasporeda
3.1 Sastav sustava
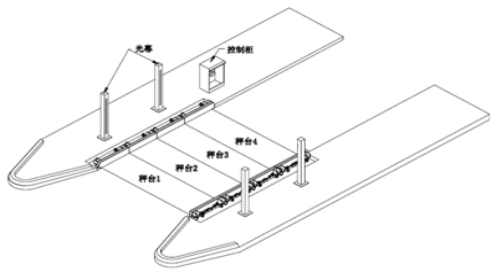
Sustav za detekciju prekoračenja i preopterećenja sastoji se od ZDG dinamičke vage za vaganje osovina s četiri stola, kontrolnog instrumenta, infracrvenog separatora vozila, identifikatora osovine kotača platforme za vaganje, kontrolnog ormara (dodatna oprema: sustav za prepoznavanje registarskih pločica, sustav s velikim LED zaslonom, sustav glasovnih uputa, sustav za navođenje vozila, industrijsko računalo, pisač karata, neprekidni izvor napajanja UPS, softver za sustav detekcije prekoračenja i preopterećenja, sustav za nadzor) te ostale dodatne opreme i kabela.
3.2 Dijagram rasporeda sustava kao što je prikazano:
Tijek rada:
1) Vozila ulaze u traku redom održavajući sigurnu udaljenost, aktivirajući infracrveni separator vozila;
2) Svaka osovina vozila prolazi kroz višepovršinsku platformu za vaganje;
3) Kontroler zaslona obrađuje signal vaganja dobiven od senzora platforme za vaganje i signala senzora kotača, odvaja osovinu prema logičkim uvjetima i učinkovito rješava posebne situacije;
4) Stražnji dio vozila napušta platformu za vaganje s više površina i infracrveni separator vozila;
5) Kontroler zaslona sveobuhvatno procjenjuje signal kraja vozila na temelju signala okluzije koji detektira infracrveni separator vozila i signala vaganja koji dobiva senzor vaganja;
6) Kontroler zaslona obrađuje signal vaganja dobiven kada gore spomenuto vozilo prođe kroz platformu za vaganje;
7) Kontroler zaslona formira potpune informacije o vaganju cijelog vozila, a potpune informacije o vaganju uključuju brzinu vozila, tip osovine, težinu osovine, težinu grupe osovina, ukupnu težinu itd.;
8) Završite proces vaganja jednog vozila i pričekajte vaganje sljedećeg vozila
9) Tijekom cijelog radnog procesa, sustav automatski obrađuje razne posebne situacije, kao što su potpuni ulazak i potpuni izlazak, ponovljeni ulazak i izlazak te dugotrajno zadržavanje na platformi za vaganje;
Sustav može automatski i učinkovito riješiti situaciju s vozilom koje prati, a vaganje vozila koje prati nema utjecaja na točnost podataka.

Vrijeme objave: 20. veljače 2025.